Defining How and to What Level Autonomous Vehicles Hit the Open Road
Imagine a world without erratic driving. A world in which you could proceed through a green traffic signal without hesitation—because the person in front of you, who is in the middle of composing a text message, isn’t trying to drive a car, too.
It’s a safer place. Accidents and fatalities are greatly reduced. Congestion is relieved. More capacity is gained from our existing transportation facilities.
Possible? Many share that vision.
Car manufacturers and other heavyweight firms such as Google and Uber are doing everything in their power to get there first and mass produce vehicles that are autonomous.
Federal and state governments are working to update policy to address the rollout of driverless cars and trucks in America—in particular to assign responsibility without limiting innovation.
Human safety and improving traffic efficiency are two primary goals of the automated car revolution. It’s a genuine opportunity. According to the National Highway Traffic Safety Administration, 90 percent of crashes today occur because of human error.
(Shutterstock.com)
Levels of Automation
Automated driving isn’t cut and dry. There are varying levels.
SAE International, a professional association and standards development organization for the engineering industry, categorizes automated driving into six levels—all dependent on what duties are no longer required of a driver (or how the car and driver will interact).
It’s also important to note that the level of automation is defined by the features engaged while a vehicle is in operation.
Level 0: No Automation—A driver monitors the driving environment completely and performs all tasks.
Level 1: Driver Assistance—Systems include features such as automatic cruise control and emergency braking. However, they don’t take control of a vehicle.
Level 2: Partial Automation—Driver assistance functions can take control of the vehicle, but the driver continues to monitor the environment and operate the vehicle.
Level 3: Conditional Automation—A driver is not required to monitor the environment and can disengage. However, a driver must be prepared to take control at any time.
Level 4: High Automation—The vehicle performs all driving functions under certain (but not all) conditions. A driver may or may not have the option to control the vehicle.
Level 5: Full Automation—The people inside the vehicle are all passengers. There is no need for a steering wheel.
Future of Ride-Sharing Services
No two rollouts will be the same once this major step in mobility hits the roadways with full force. However, many experts feel ride-sharing services, or “on-demand autonomous,” will be where the technology makes the greatest impact initially.
Autonomous vehicles rely on connectivity, meaning they have access to immediate traffic conditions, weather, surface conditions, construction, maps, adjacent cars and road infrastructure.
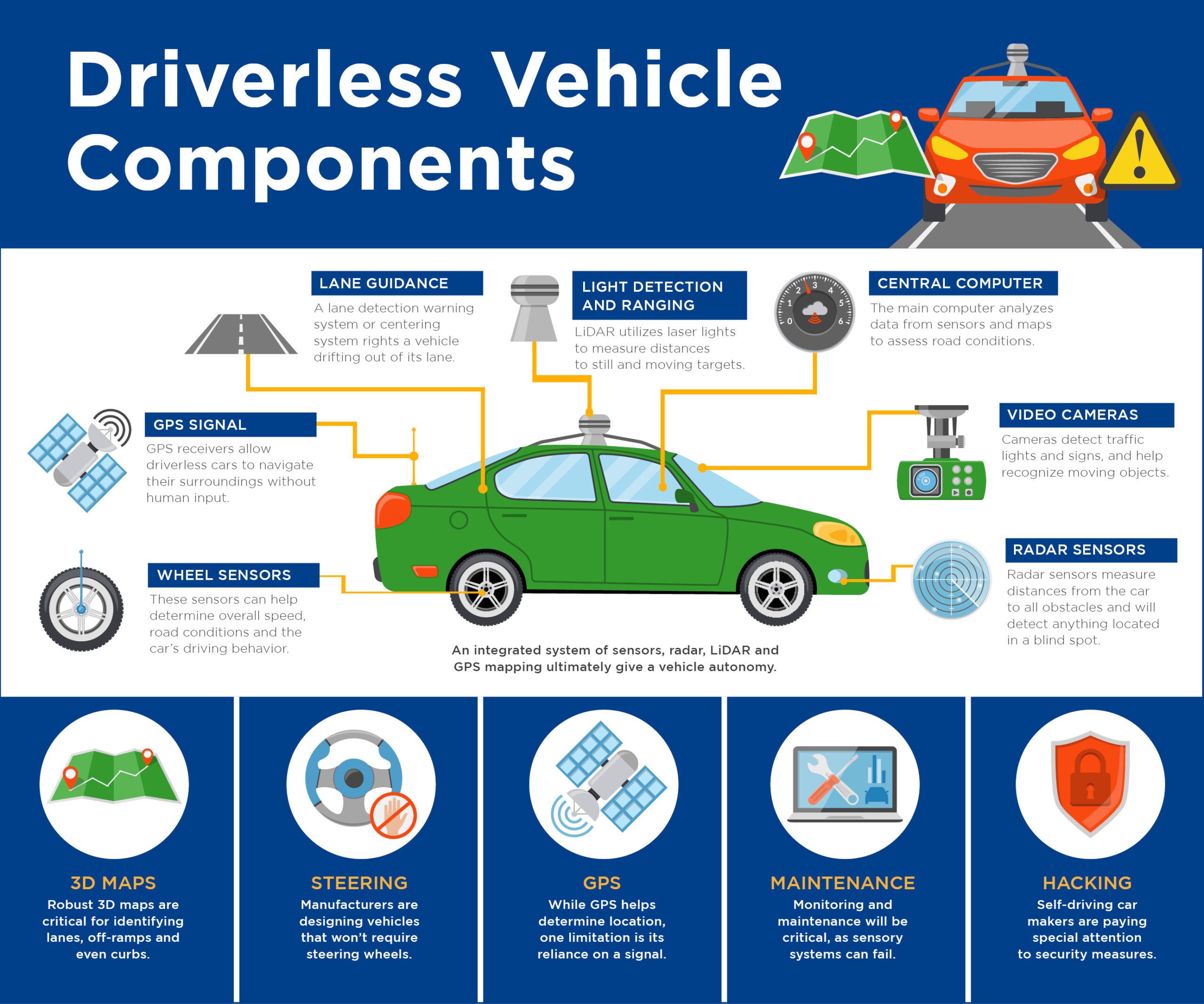
A complex system of computers, radars, LiDAR, sensors and maps guides a self-driving vehicle down the road. The infographic below outlines some of the basic features.
(Click on the graphic to enlarge it.)
For more information about Halff’s Transportation team, write to Info-Transportation@Halff.com.
Recent Stories

Halff Project Named NCTCOG CLIDE Award Winner
LEWSIVILLE, Texas — Halff’s Lewisville Business 121 Corridor Plan was selected as a 2025 Celebrating Leadership in Development Excellence (CLIDE)…

Halff Named as a Best Place to Work in Arkansas
LITTLE ROCK, Ark. — Halff, an award-winning, employee-owned and full-service infrastructure consulting firm, has been named a 2025 Best Place…